駐車の悩みを車載センシング技術が解決!? オートパーキングソリューションとは?車載事業部の社員に聞いてみた
2022.09.07
車の駐車がとにかく苦手という人は多いのではないでしょうか。ソニーセミコンダクタソリューションズ株式会社(以下、SSS)車載事業部で開発している駐車支援システムが、駐車をスムーズに楽しくしてくれるかもしれません。「オートパーキングソリューション-どこでも快適に安心して使える駐車支援」という価値を提供するために開発に挑むSSS車載事業部の中川、藤井、加納にこのソリューションの詳細を聞きました。
中川 裕衣
ソニーセミコンダクタソリューションズ株式会社
車載事業部
藤井 寛
ソニーセミコンダクタソリューションズ株式会社
車載事業部
加納 崇光
ソニーセミコンダクタソリューションズ株式会社
車載事業部
オートパーキングソリューション開発の背景
駐車支援システム向けの認識器の開発の背景として、SSSにおける車載技術の開発についてプロジェクトリーダーの加納に聞きました。まず、SSSのイメージセンサーの強みを車載業界に広げてビジネス拡大をめざす動きが2018年度くらいから開始。当初はADAS(先進運転支援システム)機能向けのフロントセンシング、19年度からALCA(オートレーンチェンジアシスト・車線変更支援)向けにリアセンシング、20年度以降は駐車支援領域向けにサラウンドセンシングという形で車両の認識範囲を広げていきました。
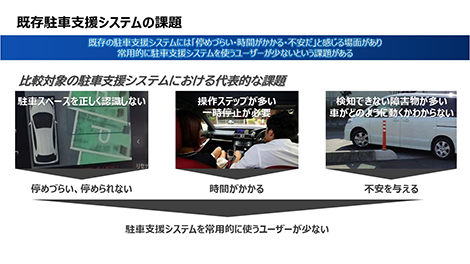
既存の駐車支援システムの課題
参考画像
拡大

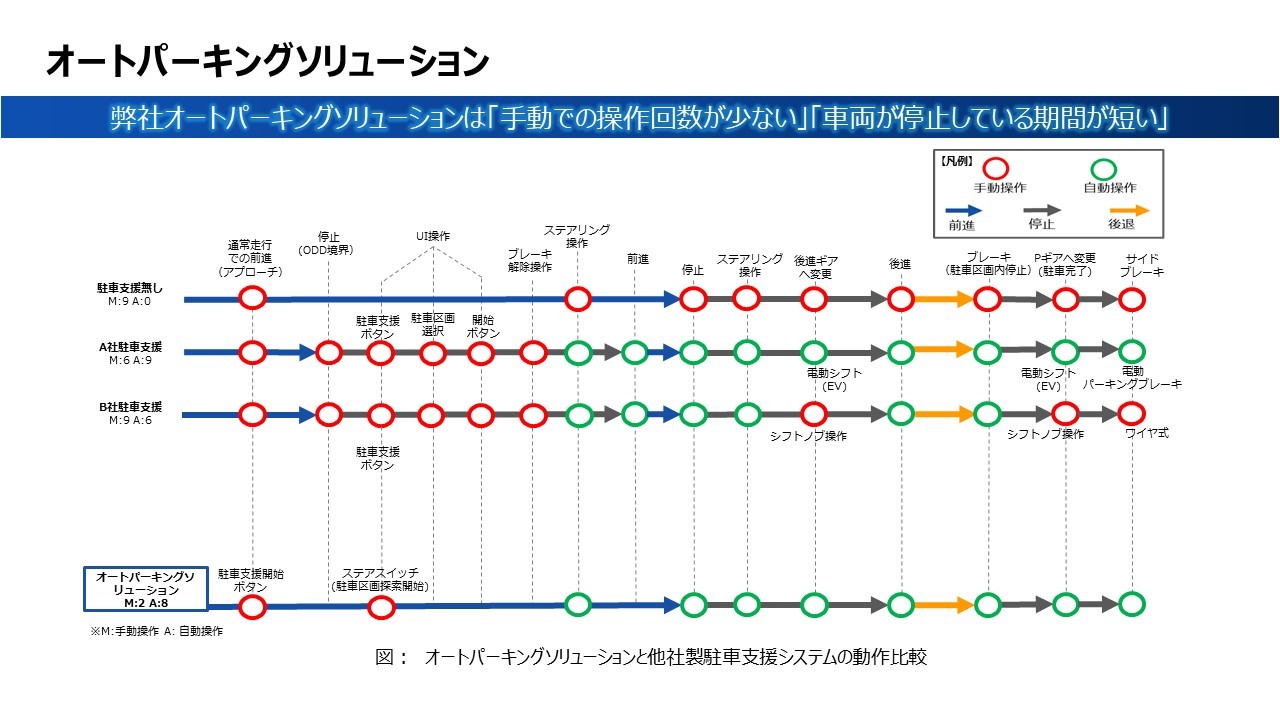
既存の駐車支援システムは自動車メーカーから商品化されているものの、駐車スペースの認識精度、操作の煩雑さや時間がかかること、車の動きが予測できなかったり、障害物の検知精度の低さなどがあり、常用的に駐車支援システムを使う人が少ないという課題があります。我々は、これらの課題を解決するとともに、駐車場を事前検出することで、駐車場所を探す煩わしさをなくすことをめざしています。
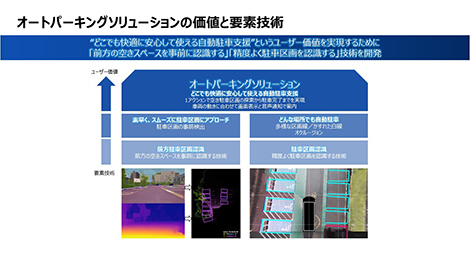
オートパーキングソリューションの
価値と要素技術
参考画像
拡大
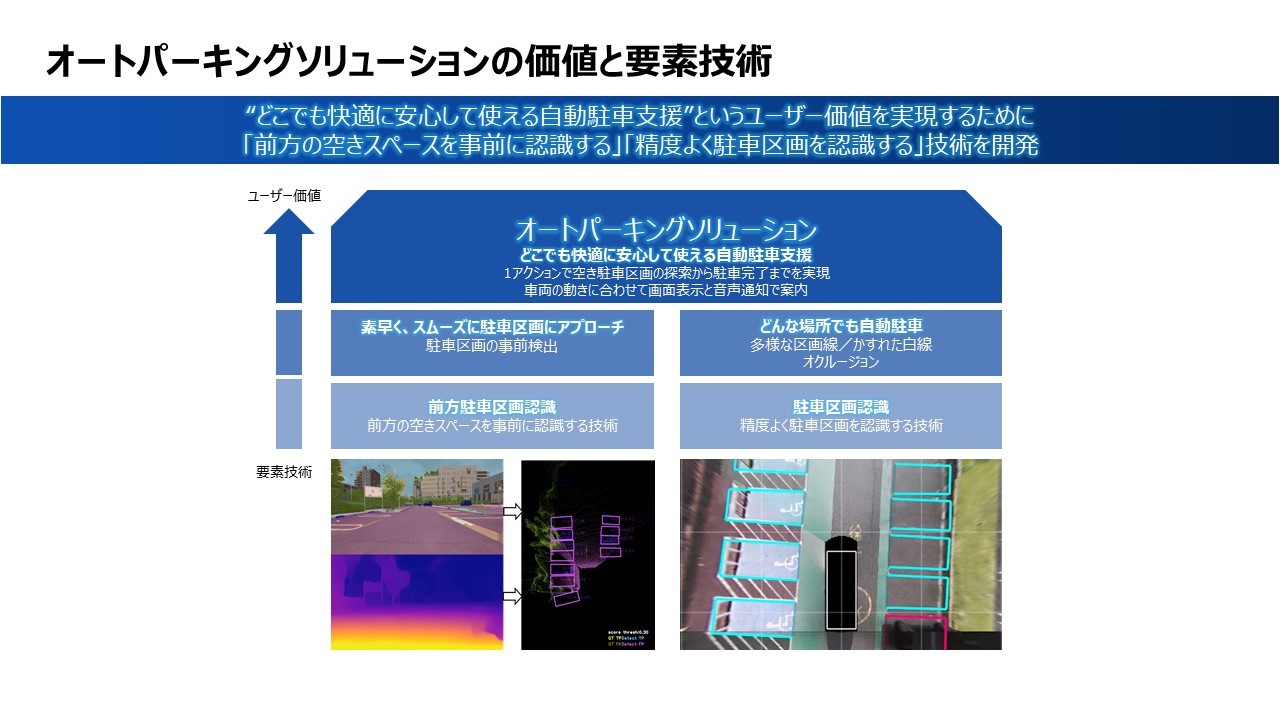
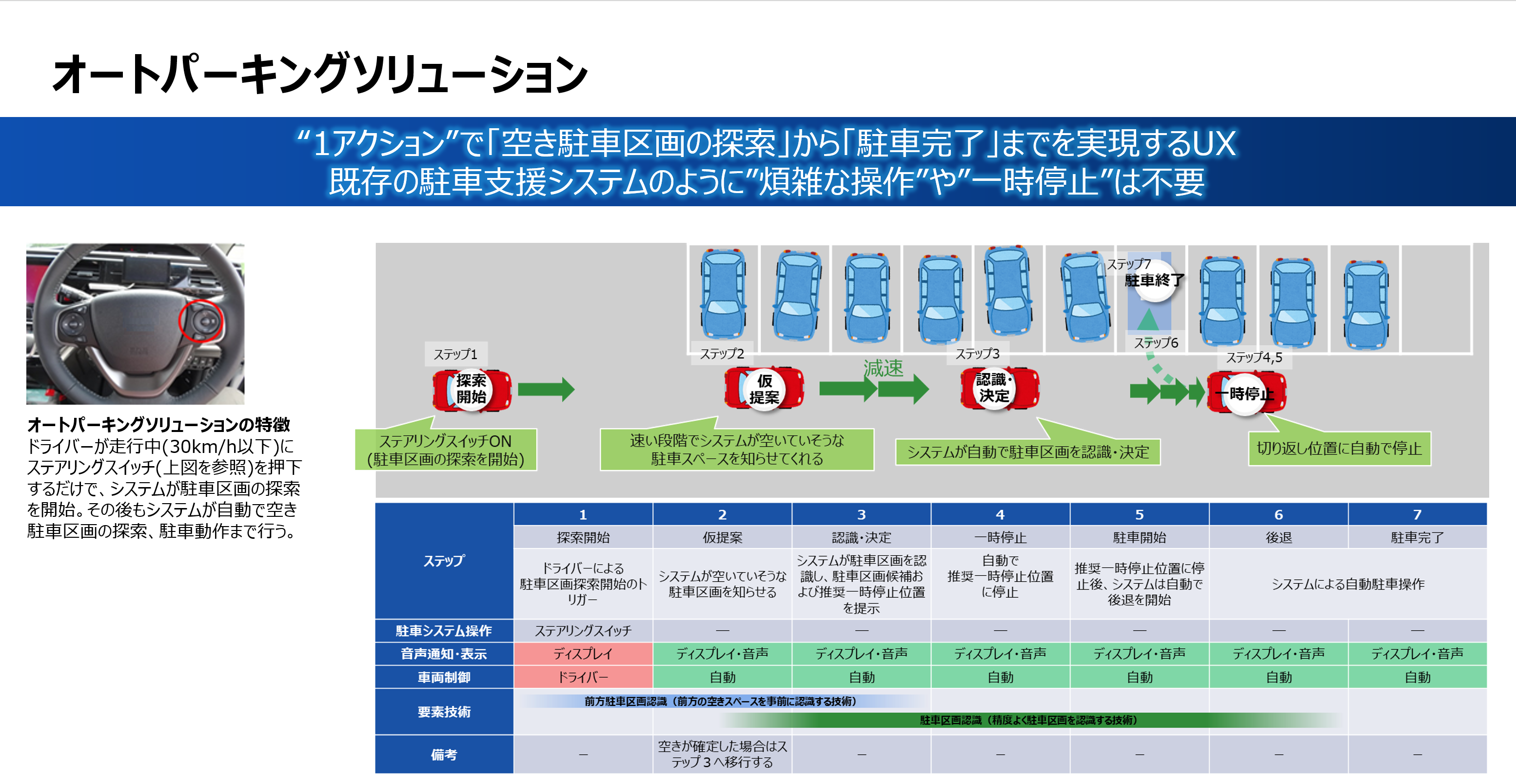
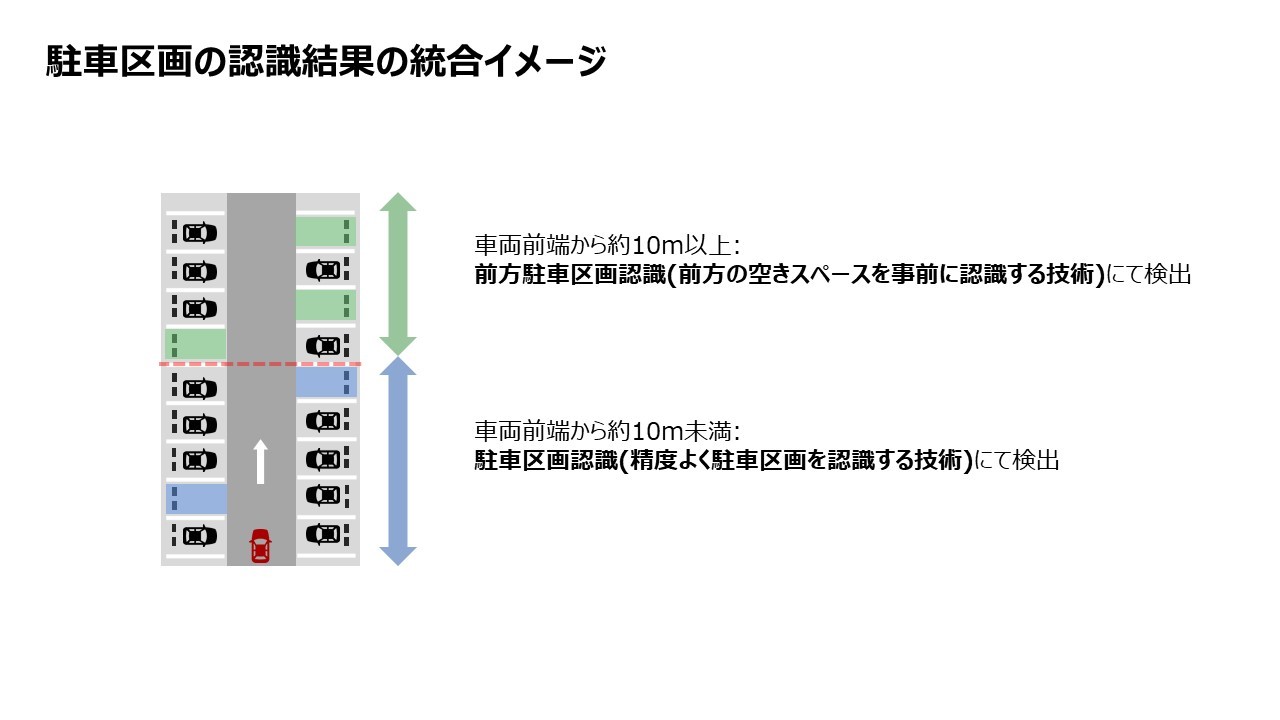
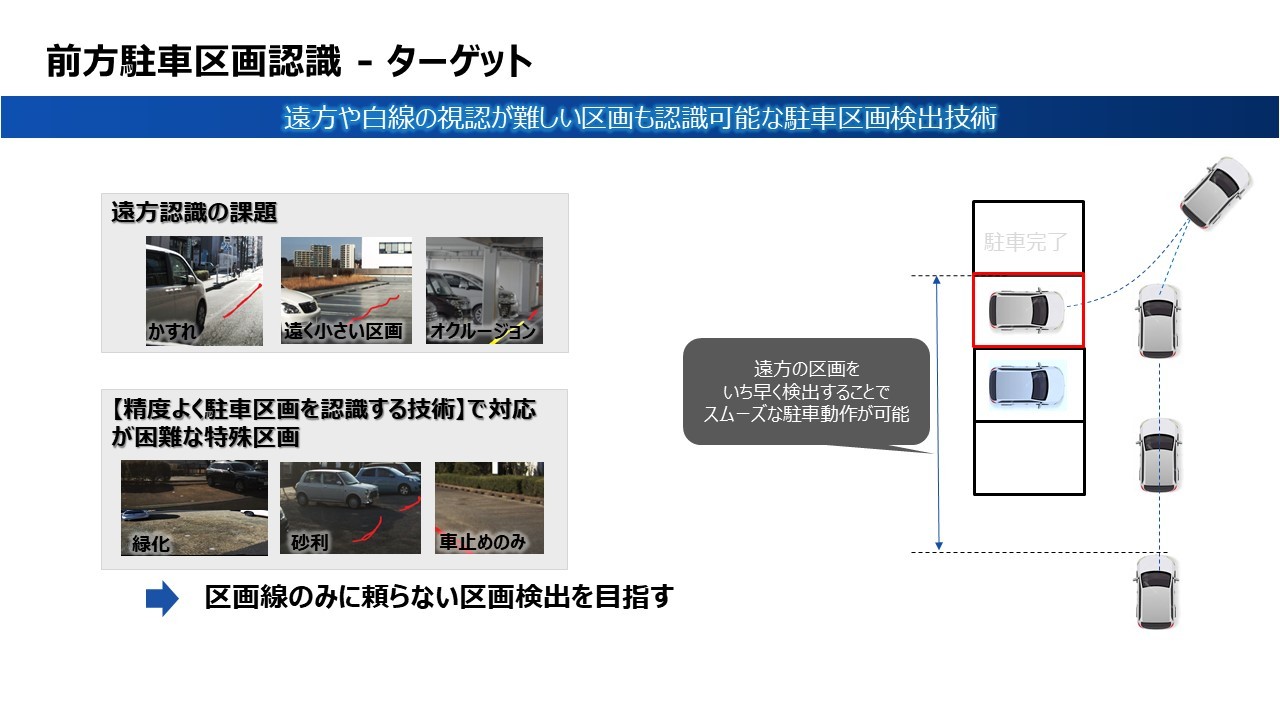
オートパーキングソリューションが提供する価値は、「どこでも快適に安心して使える自動駐車支援」。その実現のために「前方駐車区画認識」「駐車区画認識」「駐車に最適化された走行経路を生成する技術」というSSSが持つセンサー技術を活かした3つの要素技術を開発しています。前方の空きスペースを事前に認識する技術(前方駐車区画認識)、高精度に駐車枠を認識するとともに、どんな場所でも自動駐車をアシストする技術(駐車区画認識)、駐車に最適化された走行経路を生成する技術(自己位置推定・走行可能領域・経路生成)。プロジェクト開始当初は、「駐車に最適化された走行経路を生成する技術」は想定していませんでしたが、「どこでも快適に安心して使える自動駐車支援は、体験することで価値を感じられるものです。例えば、駐車のために何度もボタンを押す煩わしさや、自動駐車中にじれったく待つ時間などが改善すること、それを動画や資料で説明しても伝わりません。やはり実際の車両で体感してもらいたい、というところから駐車に最適化された走行経路を生成する技術(自己位置推定・走行可能領域・経路生成)が開発スコープに加わりました。」と加納は当時を振り返ります。
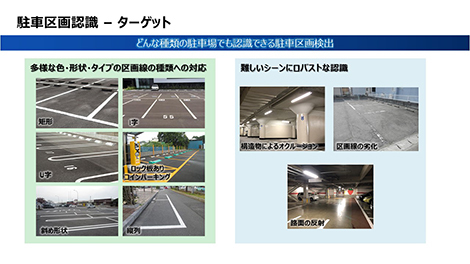
駐車区画認識(精度よく駐車枠を認識する技術)
参考画像
拡大
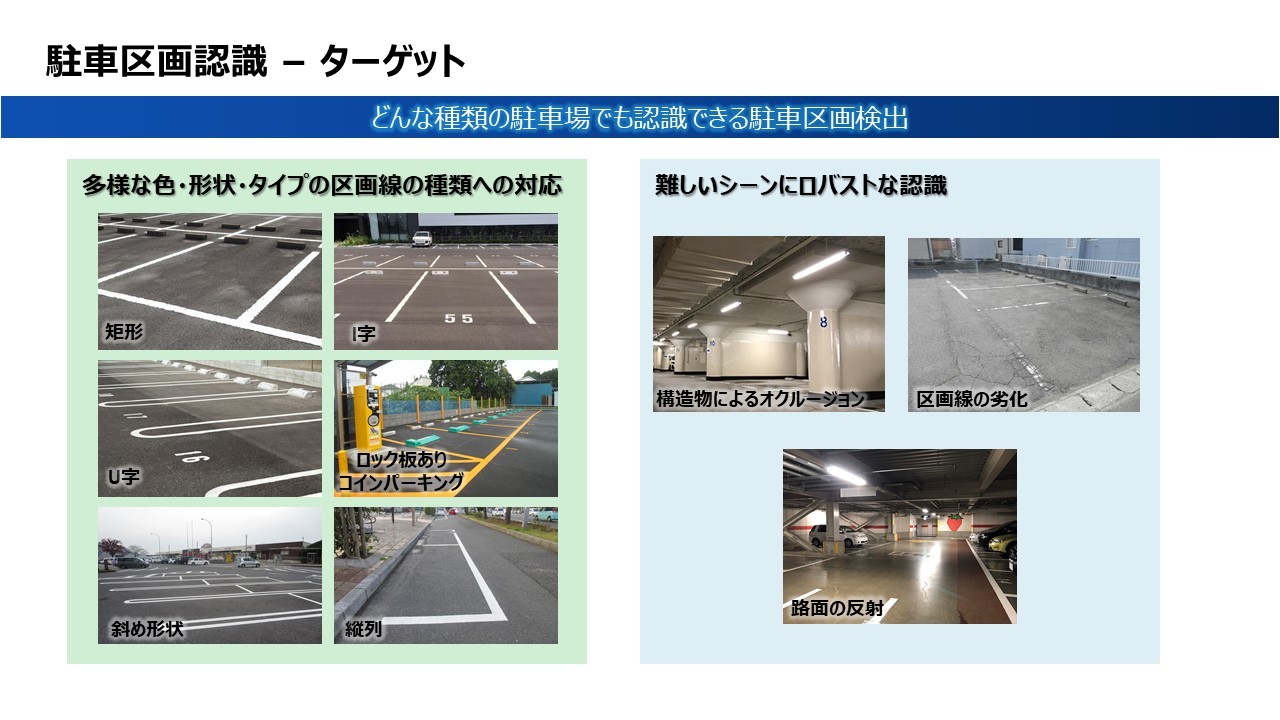
駐車区画認識技術は、車両前端から約10メートル未満という比較的近傍にある駐車空きスペースの検出を対象とし、さまざまなタイプの駐車場でも認識できる駐車区画検出をめざしています。開発担当の中川は、「I字やU字(駐車場にひかれている白線の種類(上図参照)といった多様な区画タイプや、ほんの一部しか見えていない隠れた駐車エリア(オクルージョン)の検出などの難しいポイントでも駐車区画認識技術を用いれば認識ができる。他社と比較しても、これらがアドバンテージになる」と説明します。
認識性能改善のためのデータセット
最後に、認識性能改善のためのデータセットについて。Deep learningベースの認識器の精度向上のためには高品質な学習データが欠かせません。オートパーキングソリューションの開発では、このデータ取得のためにさまざまな駐車場データや環境条件下でのデータ収集を行っています。この重要な役割を担うデータ収集・アノテーション担当の藤井のチームは、機器を搭載した試験車両で関東近郊470か所を走行し、データを収集してきました。「今回集めたデータは、晴天の昼という条件下で、さまざまな駐車場タイプを収集してきたが、今後は雨や夜のパターンも必要。ただ、晴天下でも470か所も集めるので、結構地道で大変な作業。」と語ります。
今後の課題・取り組み
現状抱えるオートパーキングソリューションの課題、今後の取り組みについて聞きました。
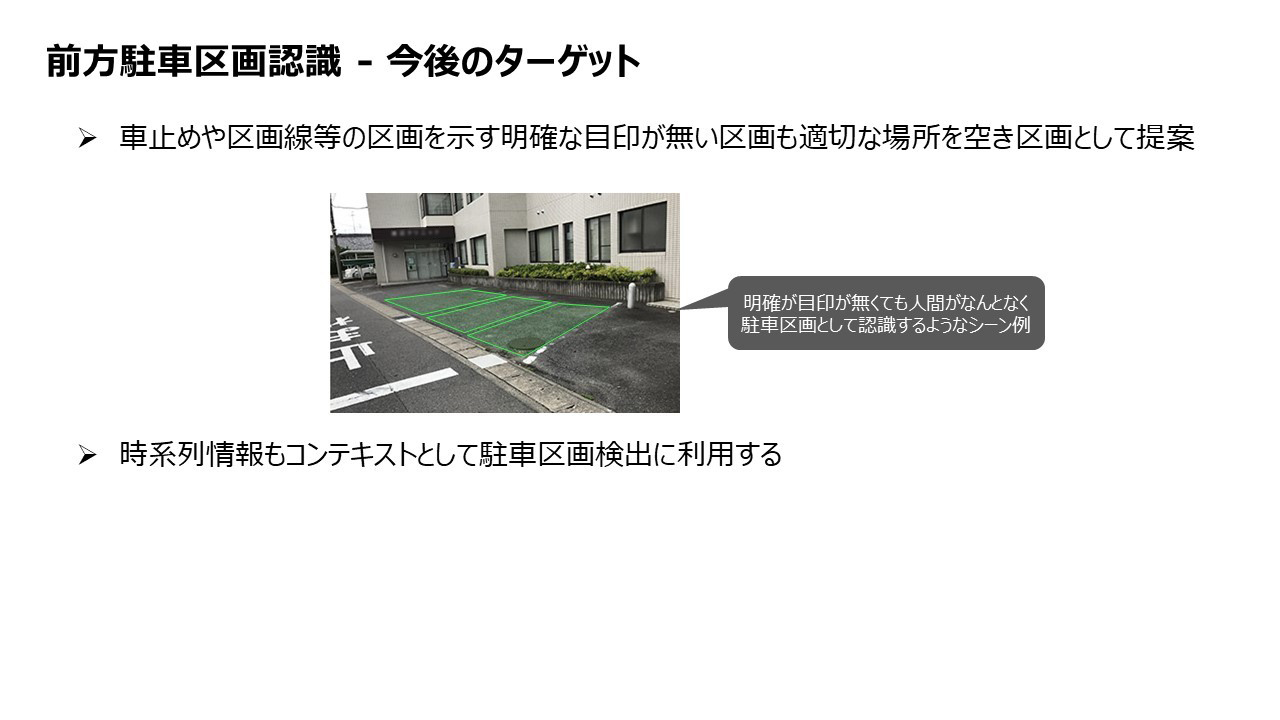
中川:今、精度よく駐車枠を認識する駐車区画認識、前方の空きスペースを事前に認識する前方駐車枠ともにカメラから取得した画像を変換して鳥瞰画像にしていますが、車両の傾きによっては、実際の区画位置と鳥瞰画像との間にずれが起きてしまうことがあります。それを技術的にどのように解決するかといったことや、さらに悪天候、夜間などのより幅広い条件下での認識を行っていくための開発を進めていきたいと思っています。
藤井:認識精度を上げていくには、やはりデータが命だと思っています。幅広いバリエーションのデータをどれだけ集められるか、それを学習に使えるかということが一番大事です。今、470か所集めてやっと形になるものができそうだと思っているので、これからいろいろな条件下でのデータをいかに効率的に集めていくかに注力していきたいですね。箱根のライブカメラを見て、霧が出ていることが分かったので、急遽データを集めに走ったこともありますよ。
加納:車載業界の中では、われわれは後発なので、既存の量産車のレベルに到達し、さらにそれを越えていかないと市場に受け入れてもらうのが難しいと感じています。そのため、夜間や悪天候などのどのような条件下でも駐車できるロバストな駐車支援システムを構築していきたいと思っています。量産化に向けて、やはり駐車区画認識技術 、前方駐車区画認識技術 の認識システムが売りなので、こんな大雨でも認識できますよといったデモをし、お客さまに採用してもらえるレベルまで持っていきたいです。今は国内をメインに開発を進めていますが、将来海外展開していく上では、国による駐車の仕方の違いなども考慮して、地域に適したシステムを作っていくことになりますね。車載開発で後発であるとともに、部としても非常に若いので、今後知見や経験を積み上げていき、量産車にわれわれの開発したシステムを搭載し、ビジネスを拡大していくのがプロジェクトの将来像・理想像ですね。